|
La problématique : ==> C4-Seq.T7 /Quels ............................................... ? (prévision sur 3 séances de 1h.30mn /Evaluation non comprise) |
| Séance -1- bernard.menier@ac-clermont.fr
|
Séance -2- |
Séance -3- |
En prévision : Séq.3 => Decouverte ARDUINO / Classique et à base de GROVE... Séq.4 => La COMMUNICATION Pilotage IR et Bluetooth /Picaxe-Arduino... Séq.5 => Fonctionnement RESEAU informatique...
|

Le tout suivi d'une EVALUATION de fin de séquence...

 |
La création de pièce en 3D : ==> ==> et pour voir en animations la CAO  voir iCi voir iCi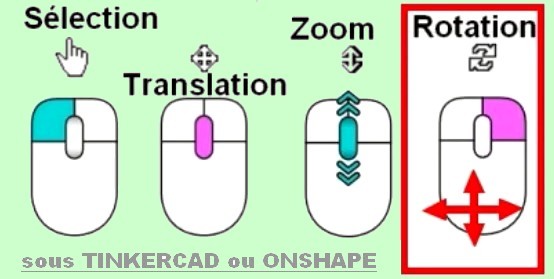 |
| Options de travail sur deux plans d'exploitation pour la représentation 3D d'une pièce |
|||
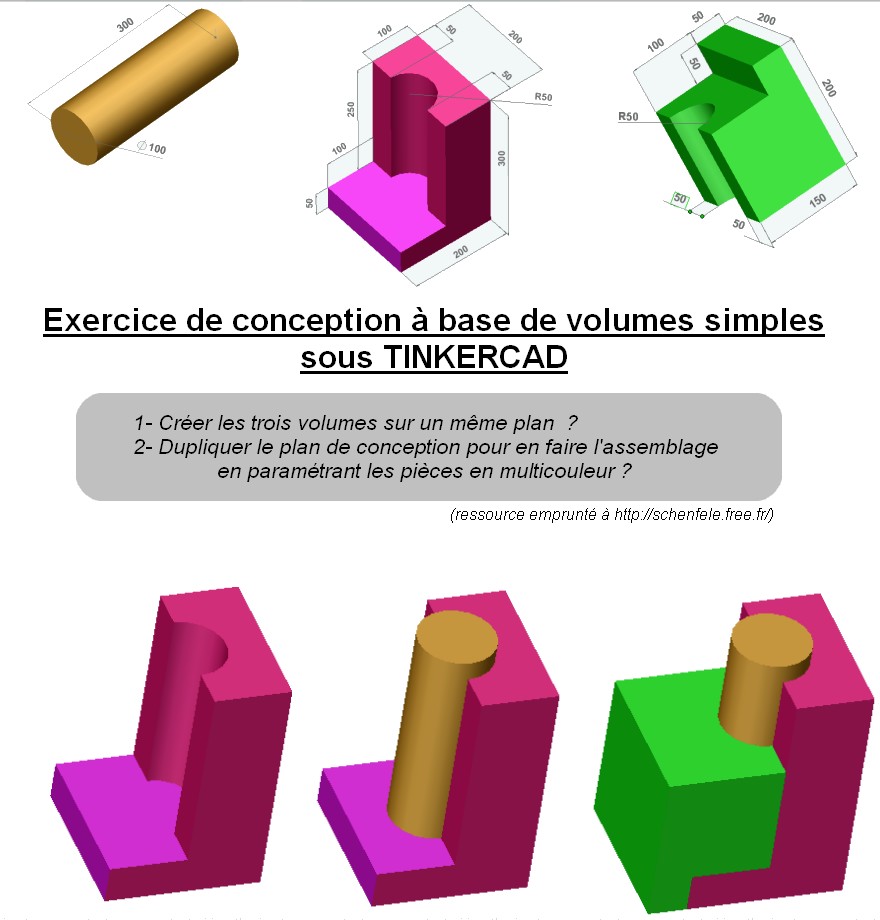
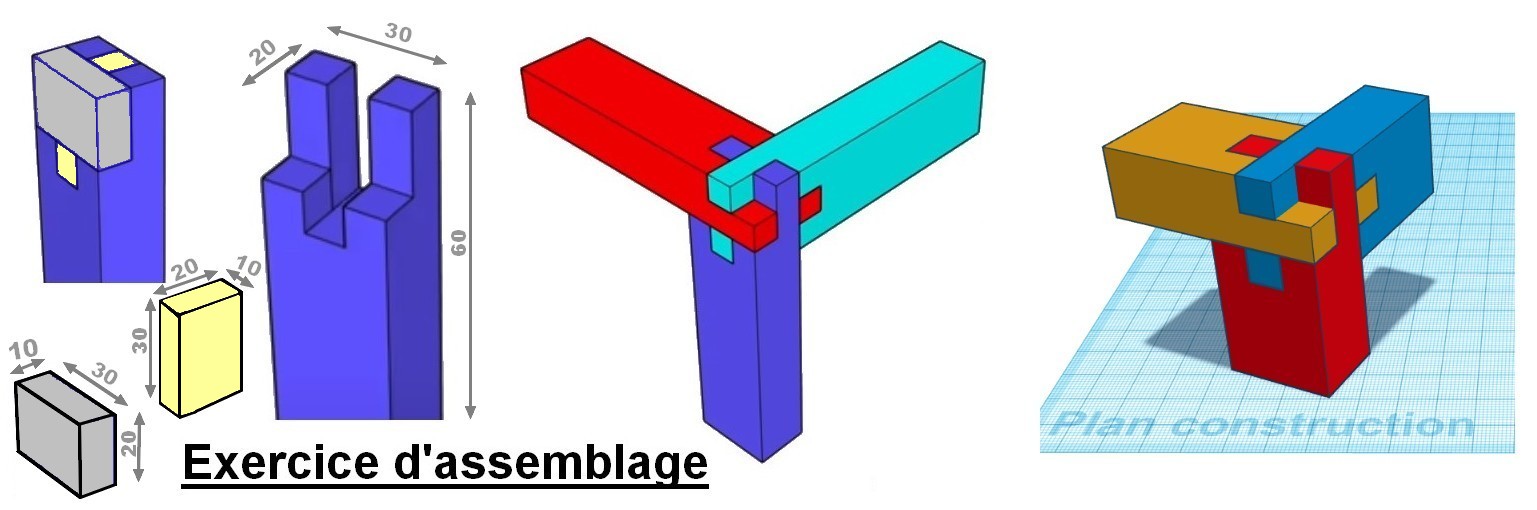
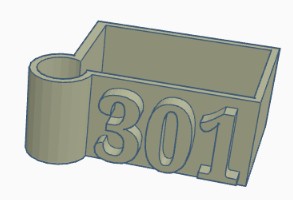 voir iCi pour la PRISE en MAIN voir iCi pour la PRISE en MAINOption 2 ==> avec la réalisation d'une des pièces de la barrière de parking 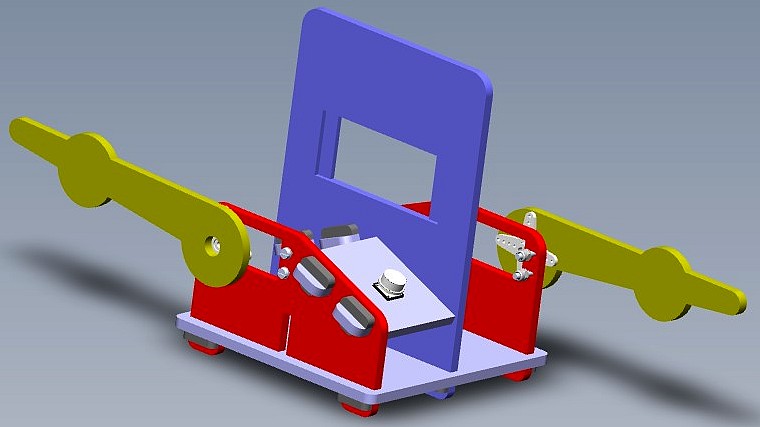 ==> Document ELEVE à suivre  iCi iCi(ATTENTION n'imprimer que la p.1 comme Trace Ecrite pour le classeur)
Rejoindre ton compte à présent ==>  / /  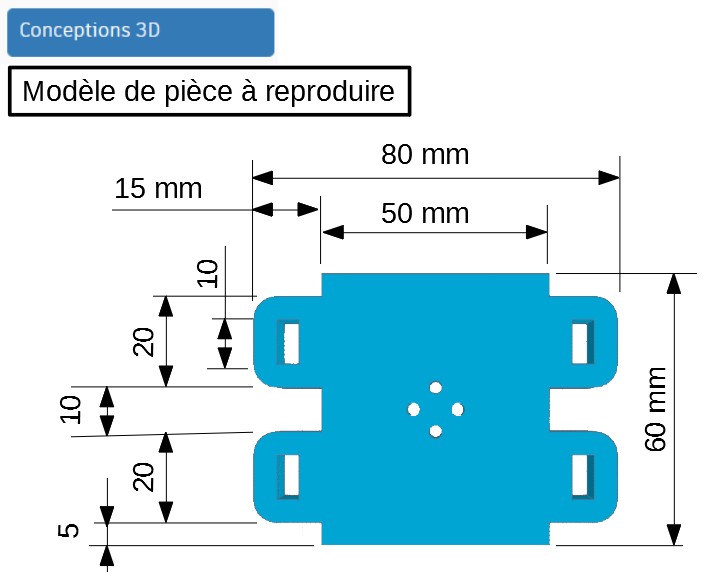 |
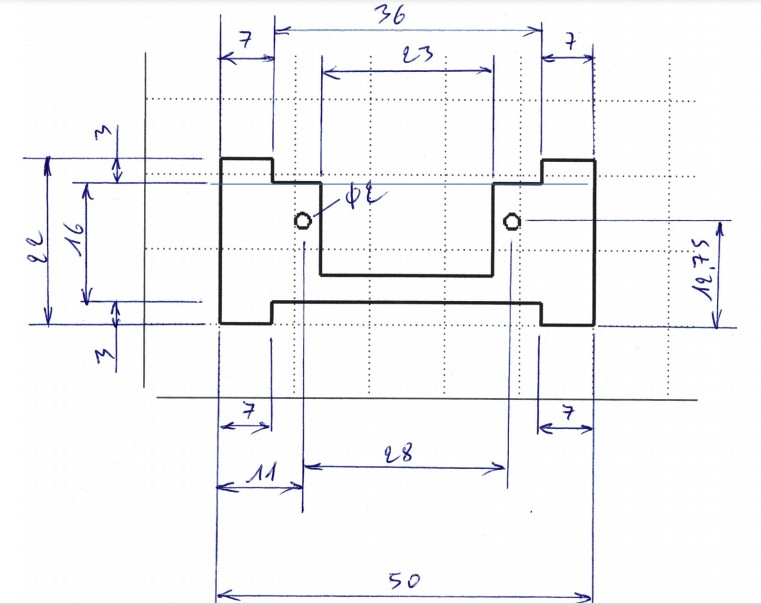
pour les adeptes de SOLIDWORKS et une utilisation plus conceptuelle (exploitation proche de celle du Lycée) Sous ONSHAPE... ==>  voir iCi voir iCi Veillez à n'utiliser que le dossier de VOTRE CLASSE !!! Veillez à n'utiliser que le dossier de VOTRE CLASSE !!!avec la réalisation d'une des pièce du robot KitroBm 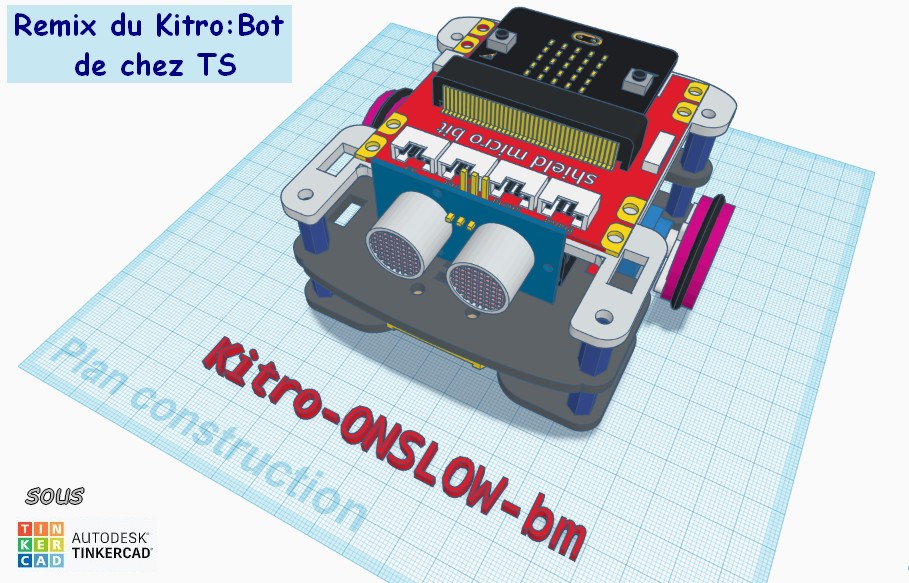  pour l'obtention des supports de servomoteurs
 |
||
- Exploitation d'un autre logiciel FreeCAD
 ==>
==>  Tutoriel de prise en main iCi
Tutoriel de prise en main iCi 
(et pour uncomplément d'exploitation sur le site http://technocalvisi.free.fr/Techno/Cycle4/fablab/imprimante3d_tutoriel_freecad_formation.pdf)
|
 voir iCi voir iCi |
 agrandir iCi
agrandir iCi- Pour se former à ONSHAPE : Que vous soyez élève ou professeur !!!
- Divers tutoriels de la création d'un compte à la réalisation de pièces et assemblage
issues de l'académie de Clermont => https://challenge-industrie.wixsite.com/saison2023/la-modelisation-3d
avec un exemple de proposition d'exemple =>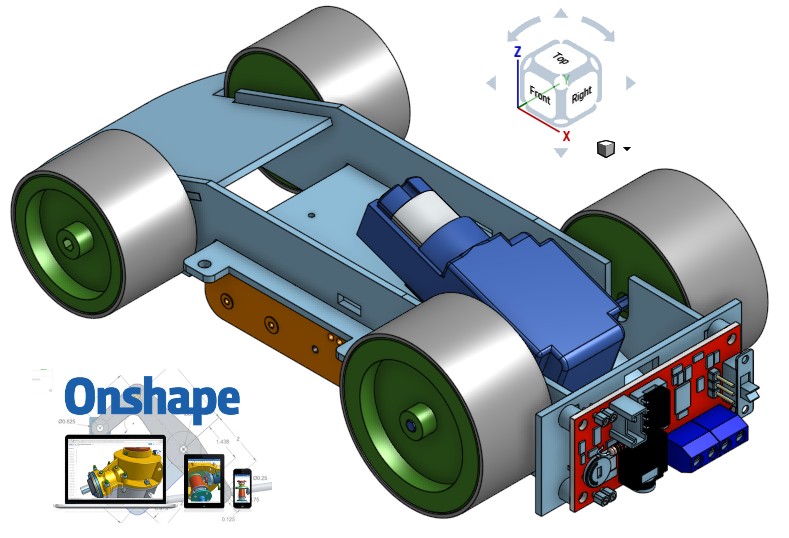 Challenge-industrie-saison2023 iCi
Challenge-industrie-saison2023 iCi
- Toutes les Informatins du Challenge => https://challenge-industrie.wixsite.com/saison2023
- S'informer dabord ==> https://eduscol.education.fr/sti/ressources_pedagogiques/onshape-modeleur-3d-saas-presentation (aller dans l'onglet fichiers et liens)
- Se lancer dans la conception jusqu'à l'assemblage ==> https://eduscol.education.fr/sti/ressources_pedagogiques/onshape-modeleur-3d-saas-fonctionnalites-de-base
(aller dans l'onglet fichiers et liens)
- A venir le travail sur l'assemblage après la prise en main de la réalisation des pièces sous ONSHAPE (merci à Christian Lossendiere)
- Lien formation sous MAGISTERE (réservé acad/Clermont.fr) ==> https://magistere.education.fr/ac-clermont/course/view.php?id=2751§ion=38
- La CONCEPTION en 3D en ressources
 avec quelques idées là ==> parcourir la resssource iCi
avec quelques idées là ==> parcourir la resssource iCi
Projet 2020-2021 /Imaginer la tête ? ==>
==>

Modèle -1-shield Bit:Maker Modèle -2-shield micro:Bit V2
Si vous disposez du MERGE cube pour la RA alors testez le lien pour moi ==> https://objects.mergeedu.com/link/8EXMD5
pour la RA alors testez le lien pour moi ==> https://objects.mergeedu.com/link/8EXMD5
(et si vous disposez d'une webcam simplement sur votre ordinateur équipé en windows10 il faut simplement installer l'application en lien direct à l'ouverture)
Il faut mettre en oeuvre l'application gratuite "Object viewer" associée au site "Miniverse". Cela nécessite dans un premier temps de se créer un compte sur le site Miniverse, puis une fois connecté, se rendre dans la partie "Mes objets" et enfin "Ajouter nouveau". Uploader le fichier contenant le modèle 3D (.fbx, .obj, .stl, .dae, .blend, .gltf, .zip) qui ne doit pas dépasser 100 Mo. Sous Tinkercad il vous faut aller dans le menu Importer / Exporter / ENVOYER vers Object Viewer...Quand celui-ci est chargé, un code est donné qu'il suffira de transmettre aux élèves. Sur les smartphones, démarrer l'application Object Viewer et entrer le code en question (Essayez par exemple "8EXMD5").
accompagné de l'ensemble des documents de travail personnalisés ==> Dossier CONCEPTION_&_CFAO-KitroBM
Dossier CONCEPTION_&_CFAO-KitroBM
==> 2 Vidéos LUMNI (la conception/ iCi et la programmation d'objet communicant/ iCi)
en lien avec le projet CORONA de l'année scolaire 2019-2020 ==> http://www.technobm.clg-gdm.fr/TEchno2016/C4-Troisieme/Seq-CORONAVIRUS-TROISIEME.html#semaine10

- Une petit adaptation du ROBOT MAQUEEN par Eric AUTANT (acad. Clermont Fnd)==>
 à découvrir iCi
à découvrir iCi
- Lien général d'information de Christian LOSSENDIERE sur plusieurs logiciels de CAO :
 https://scenari.techno-melh.xyz/modelisation-3d/co/1-introduction.html
https://scenari.techno-melh.xyz/modelisation-3d/co/1-introduction.html
- Lien de découverte et présentation de différents logiciel 3D pour la conception de pièces à impromer en 3D /
- Autres PROJETS possibles ==>

https://fr.vittascience.com/shop
- Premier lien d'AIDE avec La CONCEPTION 3D sous TINKERCAD ==> http://ferry.techno.free.fr/acctuto/
- Second lien d'aide à la prise en main (vidéo de 12 min) ==> par David CHARY https://www.youtube.com/watch?v=GlaU-xwzb98
- Autre aide en PREMIER VISIONNAGE pour les ELEVES ==> https://ent2d.ac-bordeaux.fr/disciplines/sti-college/2020/04/01/tinkercad-classrooms-gerer-ses-classes-a-distance/
( dirrect / https://www.youtube.com/watch?v=uSVEwFfmZds&feature=youtu.be ) - Autre lien acad ORLEANS-TOURS ==> https://tribu.phm.education.gouv.fr/portal/pagemarker/............../activites-avec-thinkercad/documents/des-activites-autour-de/conceptions-3d
- Divers tutoriels de la création d'un compte à la réalisation de pièces et assemblage
- Exemple de développement d'un concours de Présentation de robots à thèmes :

Ressources provisoires :
==> Accès aux travaux de CONCEPTION Voir iCi pour la prise en main de SOLIDWORKS
- Vidéo sur la prose en main de solidworks-2010 =>
 https://www.youtube.com/watch?v=ImIuGNGbMFQ
https://www.youtube.com/watch?v=ImIuGNGbMFQ - Table des matières complète pour SOLIDWORKS
 ==> http://pub.phyks.me/sdz/sdz/apprenez-a-utiliser-solidworks.html
==> http://pub.phyks.me/sdz/sdz/apprenez-a-utiliser-solidworks.html
- L'assemblage sous solidworks :
- Autres tutoriels =>
 http://www.lossendiere.com/2017/02/28/pour-en-apprendre-plus-avec-la-modelisation-solidworks/
http://www.lossendiere.com/2017/02/28/pour-en-apprendre-plus-avec-la-modelisation-solidworks/
- Contact pour CADEWARE devenu ==> https://www.visiativ-education-recherche.fr/
- Complément sur la mesure au pied à Coulisse Voir iCi
autre lien ecture au PIED à COULISSE :
- Deux dossier de Travail sur la Conception des chassis...
- La Motorisation sur moteurs à Courant Continu (voir iCi-1)
- Autre Test sur la Motorisation moteur à Courant Continu (voir iCi-2)
- Pour la simulation : une vidéo avant d'utiliser des Logiciels appropriés (solidworks ou Solidedge...)
https://www.youtube.com/watch?v=fmKKFkREu8Q

- Pour La simulation de La construction d'une structure de pont =>
 https://www.youtube.com/watch?v=GpffYFlyios
https://www.youtube.com/watch?v=GpffYFlyios
- Pour une simulation de commande avec ARDUINO sour modèle SKETCHUP :
==> Lien descriptif de l'exploitation pour mettre en oeuvre Voir iCi (ressource acad. Creteil par Adrien Lakomy)
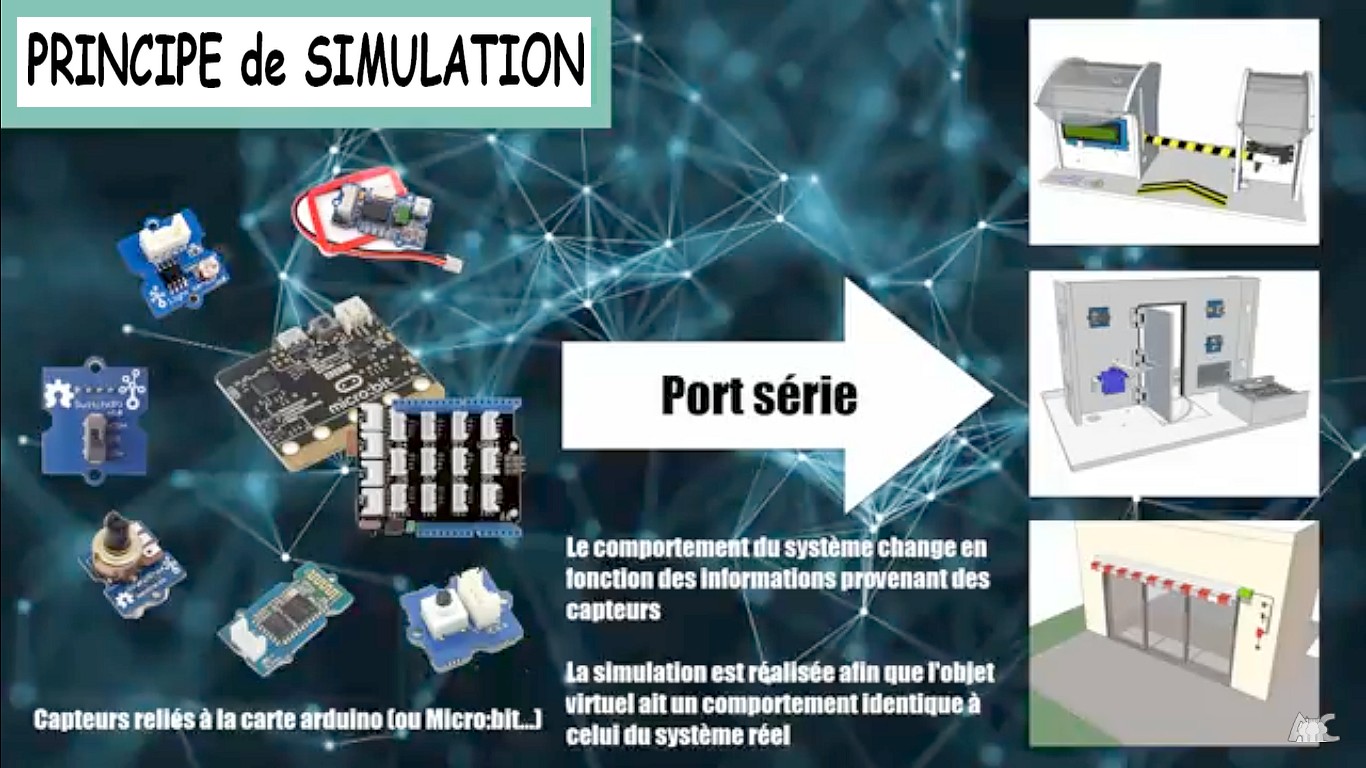
voir iCi en VIDEO de démo
- Exemple d'aboutissement du travai de recherche à la conception :
 voir iCi
voir iCi
- Et si c'est FREECAD l'application :
===> NOUVELLES Ressources FREECAD https://tube-sciences-technologies.apps.education.fr/videos/local?categoryOneOf=102&s=3
TUTORIEL Débutant pièce mécanique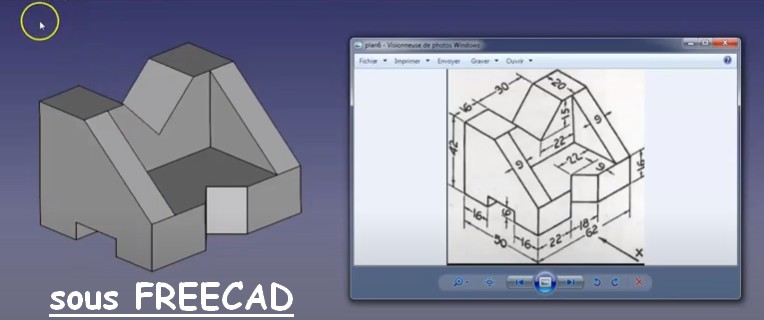 => https://www.youtube.com/watch?v=dzoBNKVkuXo
=> https://www.youtube.com/watch?v=dzoBNKVkuXo
TUTORIEL simple pour réalisation d'un marque-page => http://michel.roemhild.free.fr/?Creer-un-marque-page-avec-Freecad&lang=fr
TUTORIEL /Réalisation d'un Dé sous FREECAD ==> https://www.youtube.com/watch?v=a6XbLgr69w8
Autre support-clées usb sous FREECAD ==> https://www.youtube.com/watch?v=IsELrBwV1ks
sous FREECAD ==> https://www.youtube.com/watch?v=IsELrBwV1ks
et sous FUSION 360 ==> https://www.youtube.com/watch?v=cqcxUzGgspY
Les ressources en ligne => http://scolawebtv.crdp-versailles.fr/recherche.php?recherche=freecad
=> https://www.youtube.com/channel/UChwUxlPx6EP4hKFQyA4rCuQ
autres solution les solutions GRATUITE pour le système éducatif :
(Inventor + Fusion360 + autres...)
https://www.autodesk.fr/education/free-educational-software
https://www.autodesk.com/education/home
{kind=link}
{kind=link}
- Projet DISTRIBUTEUR automatique de GEL antibactériel : Vidéo déclenchante d'idée de projet iCi
Quelques vidéos =>