pour vous connecter  -un CODE classe- Lien DIRECT(ci-dessous)  ===> 3PPN EGT9 RF8X / lien iCi Pour les 302 : ===> I7PU RPDC 9SRE / lien iCi Pour les 303 : ===> PABT GR4Z YGSR / lien iCi Pour les 304 : ===> 6UH3 MB2V 6XS9 / lien iCi Pour les 305 : ===> RXAV BUHG MVVL / lien iCi Pour les 306 : ===> 4D8C LHTL IWVS / lien iCi Pour les 307 /Club : ===> PFRY GPRD QPJK / lien iCi Classe anonymée : Salle 108 (identification par poste de Travail 5°-4°) ===> W6TE 9LI7 XIEX / lien iCi Classe anonymée : Salle 109 (identification par poste de Travail 5°-4°) ===> VXTC UE5Y 6GBV / lien iCi Consignes départ... 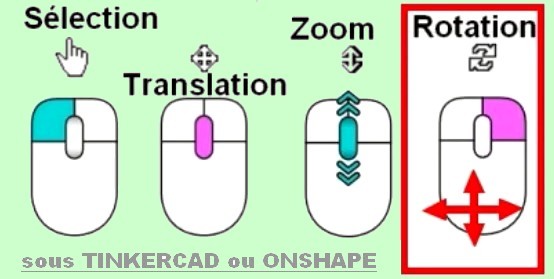 |
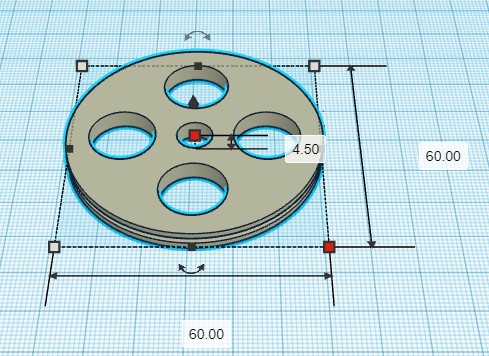
 Agrandir iCi Pièce n°2 Agrandir iCi Pièce n°2  voir iCi voir iCi (avec les dimensions ==> iCi) => Développement  iCi iCiexemple d'application /Ressource clg Jean Jaurès-Peyrolles-en-Provence
Assemblage n°3 => 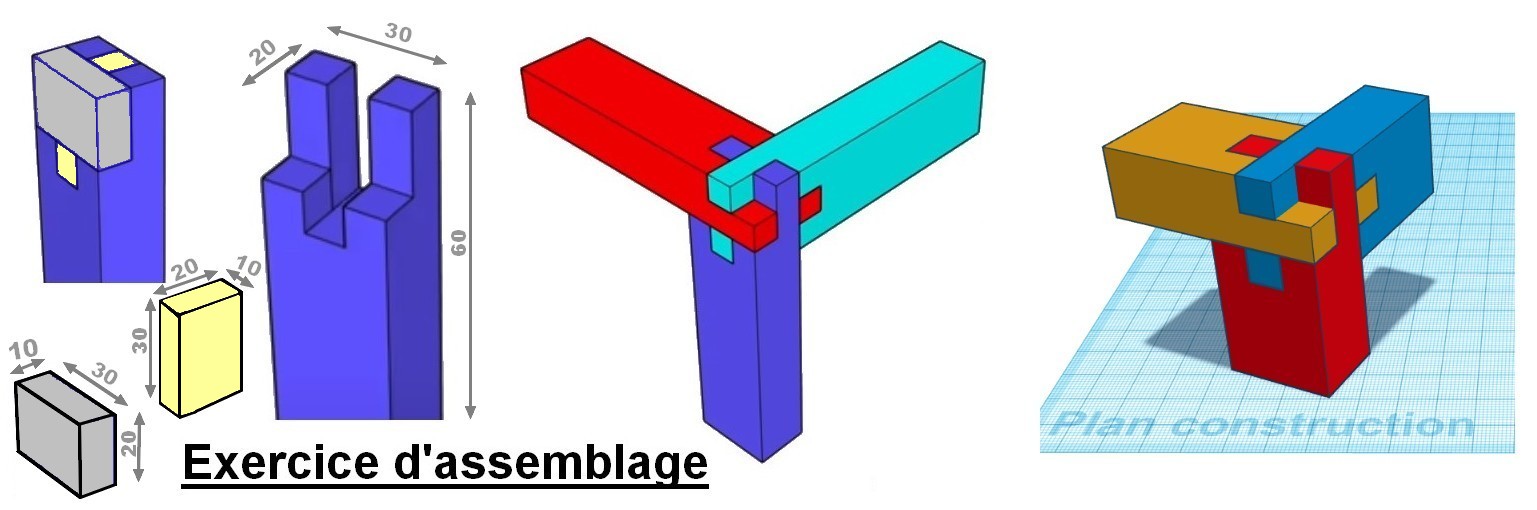 voir iCi voir iCi |

 voir iCi
voir iCi
 301abcd)
301abcd)
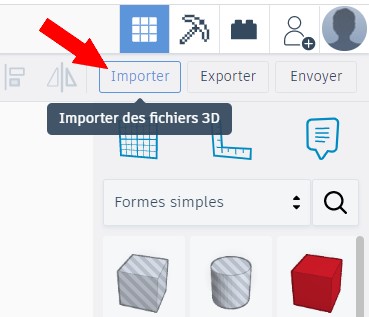
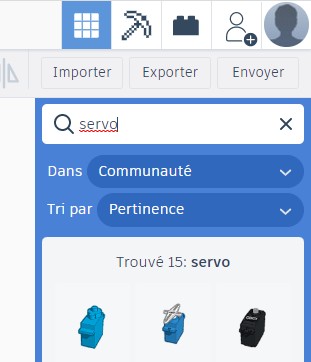
 https://www.tinkercad.com
https://www.tinkercad.com- TUTORIEL TINKERCAD réalisé par Laurent Chastaing ==> http://moncoursdetechno.fr/didacticiels/tinkercad/tinkercad.html
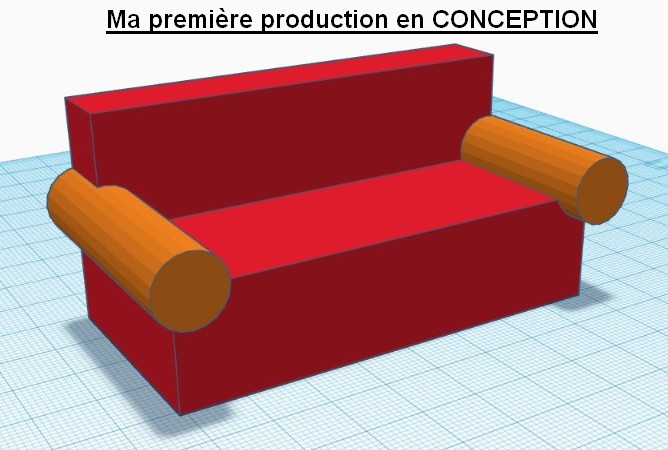
 Procédure CONCEPTION CAO-TINKERCAD du Porte-Clées F32-Onslow
Procédure CONCEPTION CAO-TINKERCAD du Porte-Clées F32-Onslow  Voir iCi
Voir iCi
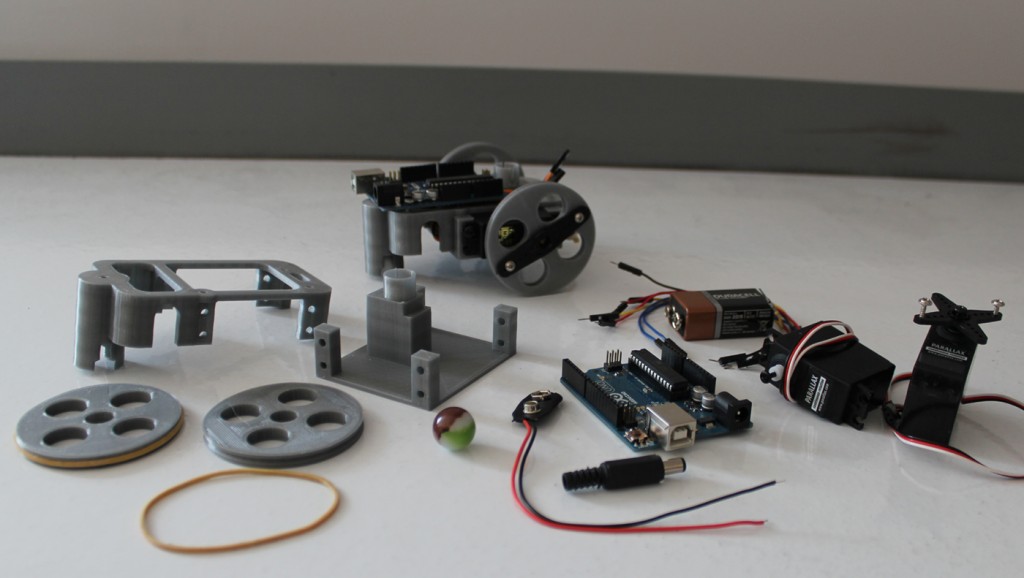
Travail de microPROJET en cours de quatrième : ==> Il s'agit de la conception en CAO pour apporter la modification de positionnement du bandage des roues d'un prototype de robot en construction à la base de celui en modèle à l'adresse suivante ... https://quai-lab.com/the-drawing-bot-tuto-13/ Mission n°1 / -La première modification consiste à substituer un bandage à élastique plat au montage existant (à base d'un joint torique/circulaire).
Mission n°3 / -L'assemblage actuel n'est que provisoir et réalisé par fixation par élastique.
Mission n°4 / -Il faut réaliser les adaptations nécessaires pour les différentes fonctions imaginées pour le Robot. 4.1 -Il faut revoir l'adaptation du stylo sous Tinkercad ? 4.2 -Il faut prévoir une nouvelle plateforme pour recevoir le godet-chargeur sous Tinkercad ? 4.3 -Il faut prévoir l'adaptation l'adaptation du Godet-chargeur en fourche à palette sous Tinkercad ? 4.4 -Il faut prévoir une adaptation de contacts comme détecteur de ligne à suivre sous Tinkercad ? 4.5 -... Travail pour Cale porte en CINQUIEME / -Pour vos recherches, il faut essayer avec bloc porte ou cale porte et stl ou même impression3D...   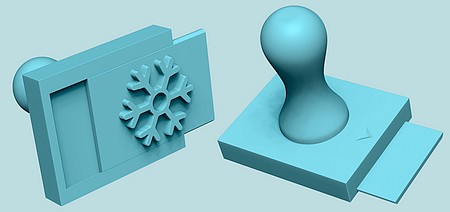 lien => https://cults3d.com/fr/mod%C3%A8le-3d/outil/stamp-25-ice-crystal-fondant-decoration-maker-toy Projet CINQUIEME : en image fichier joint sur ressource nouveau manuel de 5° DELAGRAVE L'idée ==> Développer et produire un jeu d'échec pour le FSE du collège... 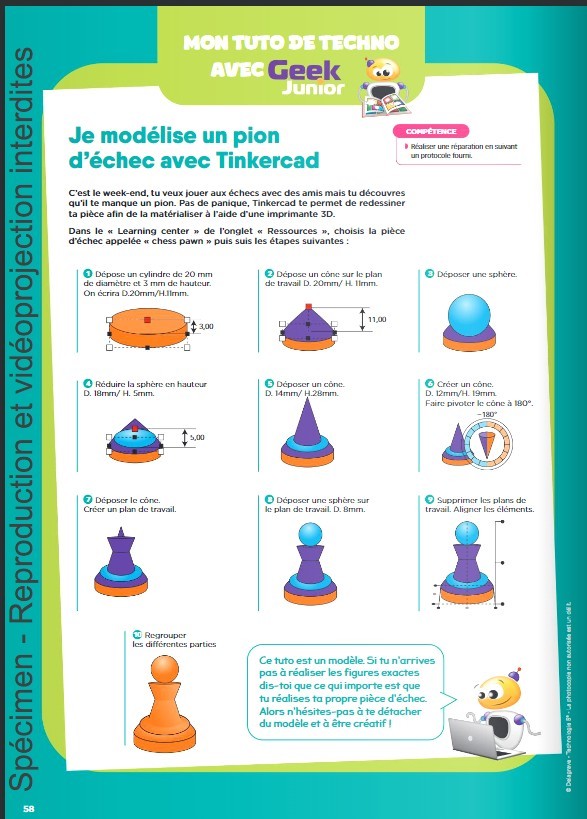 YAPLUKA... YAPLUKA...-Pour un projet plus ambitieux sous ONESHAP ==>  |